什么是 $A*$ (A-star) 算法
A-star 算法在图上为点定义了估价函数 $f(x)$,表示 $x$ 到终点的估计距离,并且保证 $f(x) \leqslant g(x)$(其中 $g(x)$ 表示点 $x$ 到终点的真实距离),由此,我们可以使用优先队列维护 $d(x)+f(x)$ (其中 $d(x)$ 表示起点到点 $x$ 的真实距离),每次取出最小值,用其点更新其他节点,并入队。那么终点第一次出队时,就是最短路。
补充:A-star 实质就是剪枝的搜索。
证明:
反证法,假设不是最短路,即存在从起点到终点的另一个路径,其长度 $d < d(t)$ ,其中 $t$ 是终点(注意到终点到终点的估价 $f(t)=0$)。又最优解路径上一定有点在优先队列中,不放设其中一个点为 $u$,则 $d(t)=d(t)+f(t) > d=d(u)+g(u) \geqslant d(u)+f(u)$,即有 $d(t)+f(t) > d(u) + f(u)$,这与算法中 $d(t)+f(t)$ 是队列中最小值矛盾,故假设不成立,原命题成立。
八数码
设计估价函数 $f(str)$ 表示当前状态 $str$ 中每个数和它的目标位置的曼哈顿距离之和,即可满足估价函数的性质,因为每个数只有在最优情况下才可能直接平移曼哈顿距离次。
需要注意的是,当问题无解时,带有 A-star 的搜索会退化,因此需要判断无解情况,这里不给出证明了(我不会)。
文章最后给出一种变换到 $12345678x$,输出变换操作数和过程的代码。
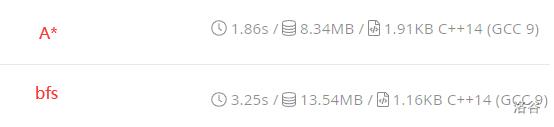
与普通 BFS 的对比:
k 短路
类似于关于最短路的证明,我们可以证明,终点 $t$ 第 $k$ 次弹出时对应的 $d(t)$ 一定是第 $k$ 短路。
至于估价函数的构造,我们可以直接采用点 $u$ 到终点的最短路长度,可以用 dijkstra 预处理。
习题
Cow Jogging G
关于 A* 的题好像并不多
CODE
八数码
#include <iostream>
#include <queue>
#include <string>
#include <cmath>
#include <unordered_map>
#include <vector>
#include <algorithm>
#define PSS pair<string, string>
#define PIP pair<int, PSS>
#define x first
#define y second.first
#define z second.second
using namespace std;
// 估价函数
int f(string state)
{
int ans = 0;
for (int i = 0; i < 9; i ++ )
{
if (state[i] == 'x')
continue;
int t = state[i] - '1';
int truex = t / 3, truey = t % 3;
int nwx = i / 3, nwy = i % 3;
ans += abs(nwx - truex) + abs(nwy - truey);
}
return ans;
}
void Astar(string start)
{
string end = "12345678x";
int dx[4] = {0, 0, 1, -1}, dy[4] = {1, -1, 0, 0};
char dc[4] = {'r', 'l', 'd', 'u'};
unordered_map<string, int> dist;
priority_queue<PIP, vector<PIP>, greater<PIP>> heap;
dist[start] = 0;
heap.push({f(start), {start, ""}});
while (heap.size())
{
PIP t = heap.top(); heap.pop();
int d = t.x;
string state = t.y, ans = t.z;
if (state == end)
{
cout << dist[state] << "\n";
cout << ans;
return;
}
int k = state.find('x');
int a = k / 3, b = k % 3;
for (int i = 0; i < 4; i ++ )
{
int xx = a + dx[i], yy = b + dy[i];
if (xx < 0 || xx > 2 || yy < 0 || yy > 2)
continue;
string nw = state;
swap(nw[a * 3 + b], nw[xx * 3 + yy]);
if (!dist.count(nw) || dist[nw] > dist[state] + 1)
{
dist[nw] = dist[state] + 1;
heap.push({f(nw) + dist[nw], {nw, ans + dc[i]}});
}
}
}
return;
}
int main()
{
string start;
char ch;
int cnt = 0;
while (cin >> ch)
{
for (int i = 0; i < start.size(); i ++ )
if (start[i] > ch && start[i] != 'x' && ch != 'x')
cnt ++;
start += ch;
}
// 判断无解
if (cnt & 1)
puts("unsolvable");
else Astar(start);
return 0;
}
k 短路
#include <iostream>
#include <algorithm>
#include <cstring>
#include <queue>
#include <vector>
#define PII pair<int, int>
#define PIP pair<int, PII>
using namespace std;
const int N = 1010, M = 2e4 + 10;
// rh 为反边,用于 dijkstra 求估价
int h[N], rh[N], e[M], ne[M], w[M], idx;
// dist 为估价, cnt[i] 为 i 出队的次数,如此省略不必要的运算。
// 特殊地,cnt[t] 的值代表当前出队的终点对应 d 是第几短路。
int dist[N], cnt[N];
bool st[N];
int n, m, s, t, k;
void add(int h[], int a, int b, int c)
{
e[idx] = b, ne[idx] = h[a], w[idx] = c, h[a] = idx ++;
}
// 求终点到每个点的最短路,即估价函数
void dijkstra()
{
memset(dist, 0x3f, sizeof dist);
dist[t] = 0;
priority_queue<PII, vector<PII>, greater<PII>> heap;
heap.push({0, t});
while (heap.size())
{
int u = heap.top().second; heap.pop();
if (st[u])
continue;
st[u] = true;
for (int i = rh[u]; ~i; i = ne[i])
{
int j = e[i];
if (dist[j] > dist[u] + w[i])
{
dist[j] = dist[u] + w[i];
heap.push({dist[j], j});
}
}
}
return;
}
int Astar()
{
priority_queue<PIP, vector<PIP>, greater<PIP>> heap;
heap.push({dist[s], {0, s}});
while (heap.size())
{
PIP nw = heap.top(); heap.pop();
int u = nw.second.second, d = nw.second.first;
cnt[u] ++;
if (cnt[t] == k)
return d;
for (int i = h[u]; ~i; i = ne[i])
{
int j = e[i];
if (cnt[j] < k)
heap.push({dist[j] + d + w[i], {d + w[i], j}});
}
}
return -1;
}
int main()
{
memset(h, -1, sizeof h);
memset(rh, -1, sizeof rh);
cin >> n >> m;
while (m -- )
{
int a, b, c;
scanf("%d%d%d", &a, &b, &c);
add(h, a, b, c);
add(rh, b, a, c);
}
cin >> s >> t >> k;
// 题目要求
if (s == t) k ++;
dijkstra();
cout << Astar();
return 0;
}